18 算法思想
0.1. 贪心算法
贪心算法有很多经典的应用,比如:
- 霍夫曼编码(Huffman Coding)
- Prim
- Kruskal 最小生成树算法
- Dijkstra 单源最短路径算法
0.1.1. 例子
- 假设有一个可以容纳 100kg 物品的背包,可以装各种物品。
- 有以下 5 种豆子,每种豆子的总量和总价值都各不相同。
- 为了让背包中所装物品的总价值最大,我们如何选择在背包中装哪些豆子?每种豆子又该装多少呢?
| 物品 | 总量(KG) | 总价值(元) |
|---|---|---|
| 黄豆 | 100 | 100 |
| 绿豆 | 30 | 90 |
| 红豆 | 60 | 120 |
| 黑豆 | 20 | 80 |
| 青豆 | 50 | 75 |
- 先算一算每个物品的单价,按照单价由高到低依次来装
- 单价从高到低排列,依次是:黑豆、绿豆、红豆、青豆、黄豆
- 所以往背包里装 20kg 黑豆、30kg 绿豆、50kg 红豆
这个问题的解决思路本质上就是贪心算法。
0.1.2. 定义
第一步,当看到这个问题的时候,首先要联想到贪心算法:针对一组数据(5种豆子),定义了限制值(100kg)和期望值(总价值),希望从中选出几个数据,在满足限制值的情况下,期望值最大。
第二步,尝试下这个问题是否可以用贪心算法解决:每次选择当前情况下,在对限制值同等贡献量(重量相同)的情况下,对期望值(总价值)贡献最大的数据。
第三步,举几个例子看贪心算法产生的结果是否是最优。大部分情况下,举几个例子验证一下就可以了。严格地证明贪心算法的正确性,是非常复杂的,需要涉及比较多的数学推理。而且,从实践的角度来说,大部分能用贪心算法解决的问题,贪心算法的正确性都是显而易见的,也不需要严格的数学推导证明。
实际上,用贪心算法解决问题的思路,并不总能给出最优解。
在一个有权图中,从顶点 S 开始,找一条到顶点 T 的最短路径(路径中边的权值和最小)。
贪心算法的解决思路是,每次都选择一条跟当前顶点相连的权最小的边,直到找到顶点 T。
按照这种思路,求出的最短路径是 S->A->E->T,路径长度是 1+4+4=9。
但是,这种贪心的选择方式,最终求的路径并不是最短路径,因为路径 S->B->D->T 才是最短路径,路径的长度是 2+2+2=6。
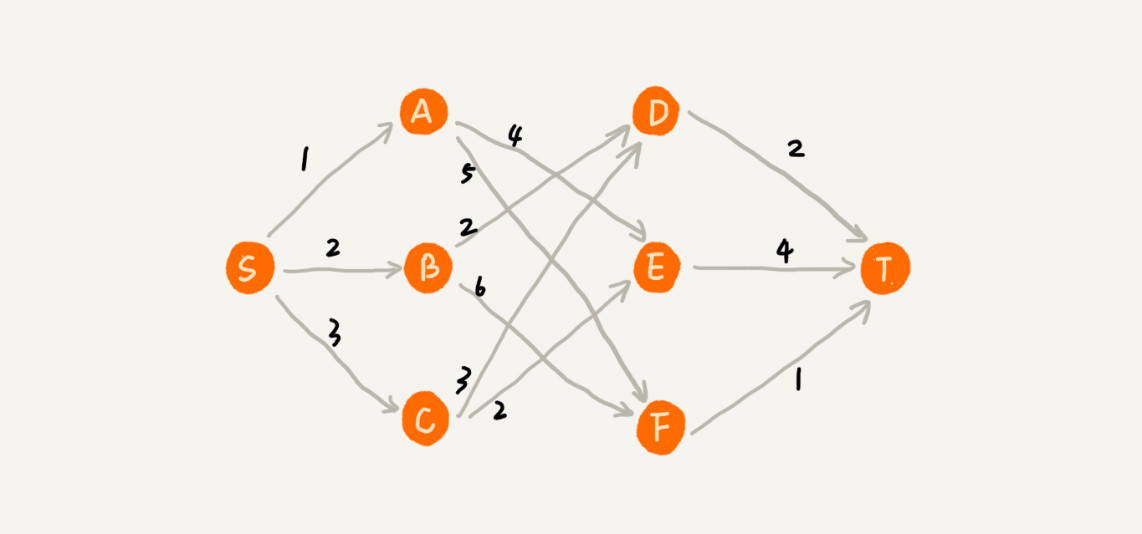
在这个问题上,贪心算法不工作的主要原因是,前面的选择,会影响后面的选择。如果第一步从顶点 S 走到顶点 A,那接下来面对的顶点和边,跟第一步从顶点 S 走到顶点 B,是完全不同的。所以,即便第一步选择最优的走法(边最短),但有可能因为这一步选择,导致后面每一步的选择都很糟糕,最终也就无缘全局最优解了。
0.1.3. 实战
0.1.3.1. 分糖果
有 m 个糖果和 n 个孩子,现在要把糖果分给这些孩子吃,但是糖果少,孩子多(
m<n),所以糖果只能分配给一部分孩子。每个糖果的大小不等,这 m 个糖果的大小分别是s1,s2,s3,……,sm。除此之外,每个孩子对糖果大小的需求也是不一样的,只有糖果的大小大于等于孩子的对糖果大小的需求的时候,孩子才得到满足。假设这 n 个孩子对糖果大小的需求分别是g1,g2,g3,……,gn。如何分配糖果,能尽可能满足最多数量的孩子?
把这个问题抽象成:
- 一组数据:从 n 个孩子中,抽取一部分孩子分配糖果
- 限制值:糖果个数 m
- 期望值:让满足的孩子的个数是最大的
用贪心算法来解决。
- 对于一个孩子来说,如果小的糖果可以满足,就没必要用更大的糖果,这样更大的就可以留给其他对糖果大小需求更大的孩子。对糖果大小需求小的孩子更容易被满足,所以从需求小的孩子开始分配糖果。因为满足一个需求大的孩子跟满足一个需求小的孩子,对期望值的贡献是一样的。
- 每次从剩下的孩子中,找出对糖果大小需求最小的,然后发给他剩下的糖果中能满足他的最小的糖果,这样得到的分配方案,也就是满足的孩子个数最多的方案。
0.1.3.2. 钱币找零
假设有 1 元、2 元、5 元、10 元、20 元、50 元、100 元这些面额的纸币,它们的张数分别是
c1、c2、c5、c10、c20、c50、c100。现在要用这些钱来支付 K 元,最少要用多少张纸币呢?
把这个问题抽象成:
- 一组数据:若干纸币
- 限制值:K元
- 期望值:纸币数量最少
用贪心算法来解决。在贡献相同期望值的情况下,希望多贡献金额。
- 每次选择小于K元的面额的纸币中面额最大的
- 选择该面额若干张,保证面额总和小于K
- 对剩余的值继续上述两个操作
0.1.3.3. 区间覆盖
假设有 n 个区间,区间的起始端点和结束端点分别是
[l1, r1],[l2, r2],[l3, r3],……,[ln, rn]。从这 n 个区间中选出一部分区间,这部分区间满足两两不相交(端点相交的情况不算相交),最多能选出多少个区间呢?
把这个问题抽象成:
- 一组数据:n个区间
- 限制值:区间不相交
- 期望值:区间数量最多
用贪心算法来解决。
- 假设这 n 个区间中最左端点是 lmin,最右端点是 rmax。这个问题就相当于选择几个不相交的区间,从左到右将[lmin, rmax]覆盖上
- 按照起始端点从小到大的顺序对这 n 个区间排序
- 每次选择左端点跟前面的已经覆盖的区间不重合的,右端点又尽量小的,这样可以让剩下的未覆盖区间尽可能的大,就可以放置更多的区间
0.1.4. 霍夫曼编码
霍夫曼编码,利用贪心算法来实现对数据压缩编码,有效节省数据存储空间。
假设有一个包含 1000 个字符的文件,每个字符占 1 个 byte(1byte=8bits),存储这 1000 个字符就一共需要 8000bits,那有没有更加节省空间的存储方式呢?
- 假设通过统计分析发现,这 1000 个字符中只包含 6 种不同字符,假设它们分别是 a、b、c、d、e、f
- 而 3 个二进制位(bit)就可以表示 8 个不同的字符,所以,为了尽量减少存储空间,每个字符用 3 个二进制位来表示
- 存储这 1000 个字符只需要 3000bits 就可以了,比原来的存储方式节省了很多空间
a(000)、b(001)、c(010)、d(011)、e(100)、f(101)还有更加节省空间的存储方式,霍夫曼编码,一种十分有效的编码方法,广泛用于数据压缩中,其压缩率通常在 20%~90% 之间。
霍夫曼编码不仅会考察文本中有多少个不同字符,还会考察每个字符出现的频率,根据频率的不同,选择不同长度的编码。
霍夫曼编码试图用这种不等长的编码方法,来进一步增加压缩的效率。
如何给不同频率的字符选择不同长度的编码呢?
把这个问题抽象成:
- 一组数据:给定的文本
- 限制值:单个字符的长度
- 期望值:存储空间最小
用贪心算法来解决。
- 把出现频率比较多的字符,用稍微短一些的编码
- 把出现频率比较少的字符,用稍微长一些的编码
对于等长的编码来说,解压缩起来很简单。比如上面例子中
abcdef用 3 个 bit 表示一个字符。在解压缩的时候,每次从文本中读取 3 位二进制码,然后翻译成对应的字符。
霍夫曼编码是不等长的,每次应该读取读取的位数无法确定,这个问题就导致霍夫曼编码解压缩起来比较复杂。为了避免解压缩过程中的歧义,霍夫曼编码要求各个字符的编码之间,不会出现某个编码是另一个编码前缀的情况。
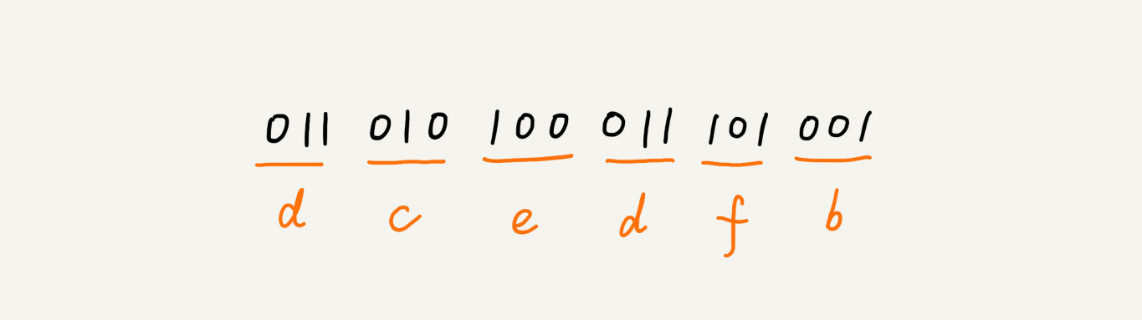
- 假设这 6 个字符出现的频率从高到低依次是 a、b、c、d、e、f。
- 编码成如下表格,任何一个字符的编码都不是另一个的前缀,在解压缩的时候,每次会读取尽可能长的可解压的二进制串,所以在解压缩的时候也不会歧义。
经过这种编码压缩之后,这 1000 个字符只需要 2100bits 就可以了。
| 字符 | 出现频率 | 编码 | 总二进制位数 |
|---|---|---|---|
| a | 450 | 1 | 450 |
| b | 350 | 01 | 700 |
| c | 90 | 001 | 270 |
| d | 60 | 0001 | 150 |
| f | 20 | 00000 | 100 |
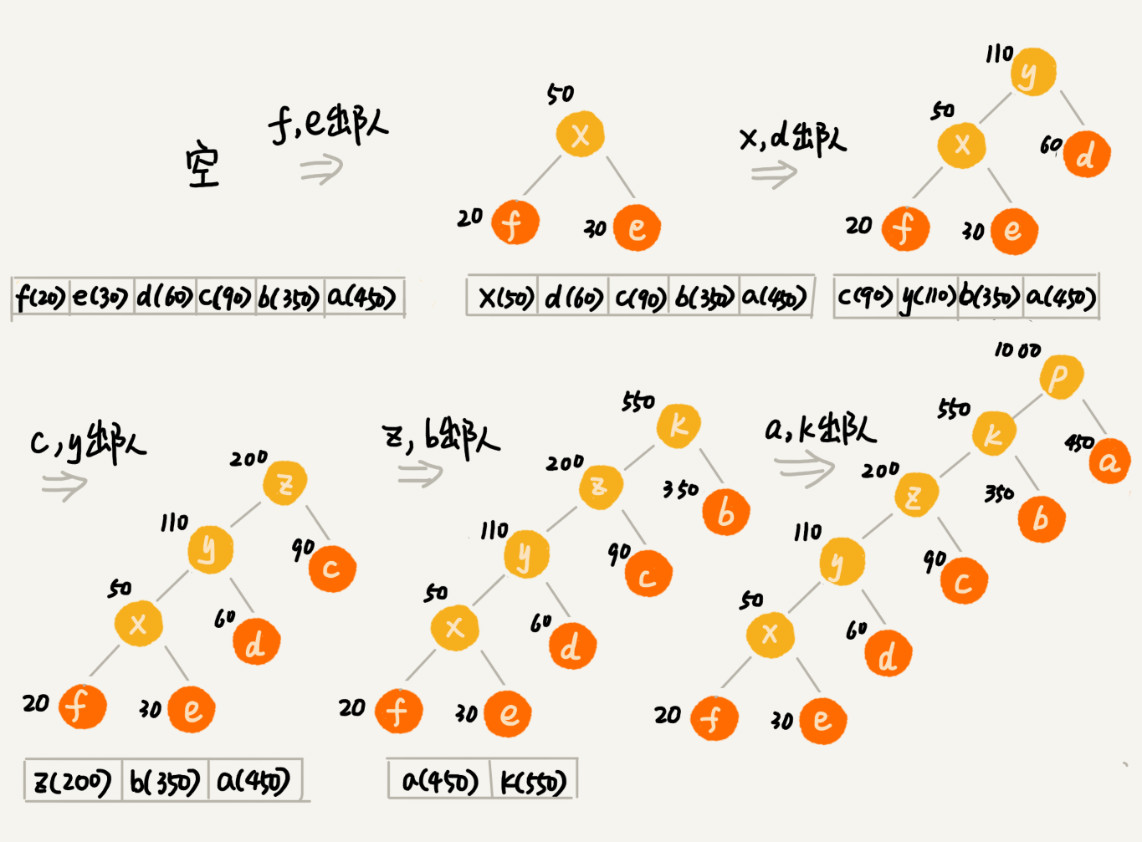
霍夫曼编码中,如何根据字符出现频率的不同,给不同的字符进行不同长度的编码,这里的处理稍微有些技巧。
- 把每个字符看作一个节点,并且附带着把频率放到优先级队列中
- 从队列中取出频率最小的两个节点 A、B,然后新建一个节点 C(频率小的放在左边)
- 把频率设置为两个节点的频率之和,并把这个新节点 C 作为节点 A、B 的父节点
- 再把 C 节点放入到优先级队列中
- 重复这个过程,直到队列中没有数据
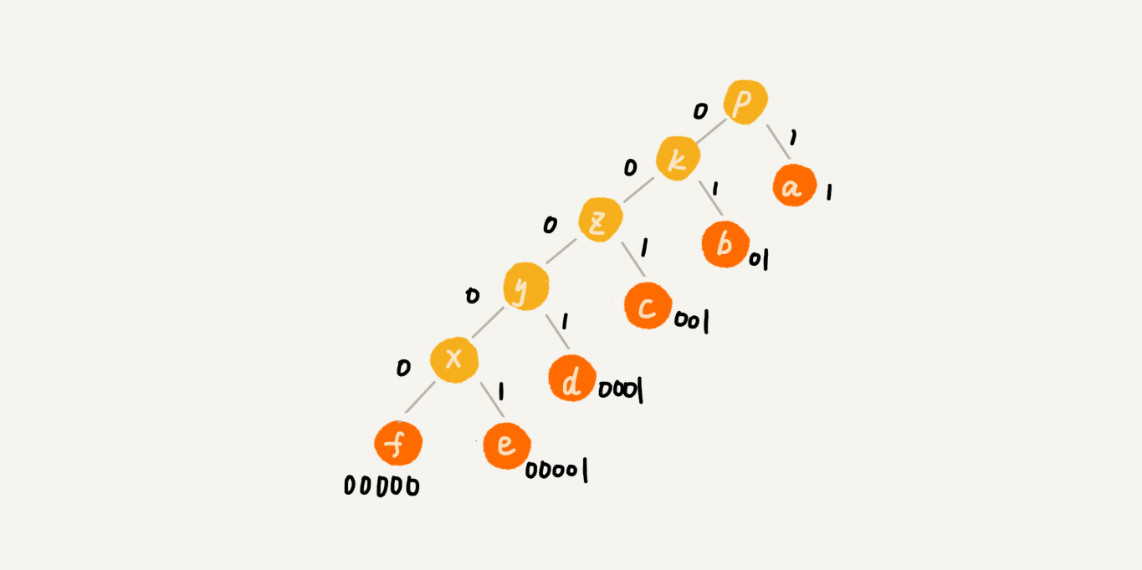
给每一条边加上一个权值:
- 指向左子节点的边统统标记为 0
- 指向右子节点的边,统统标记为 1
从根节点到叶节点的路径就是叶节点对应字符的霍夫曼编码。
实际上,贪心算法适用的场景比较有限。这种算法思想更多的是指导设计基础算法。比如最小生成树算法、单源最短路径算法,这些算法都用到了贪心算法。
0.2. 分治算法
分治算法(divide and conquer)的核心思想其实就是四个字,分而治之,将原问题划分成 n 个规模较小,并且结构与原问题相似的子问题,递归地解决这些子问题,然后再合并其结果,就得到原问题的解。
分治算法是一种处理问题的思想,递归是一种编程技巧。实际上,分治算法一般都比较适合用递归来实现。分治算法的递归实现中,每一层递归都会涉及这样三个操作:
- 分解:将原问题分解成一系列子问题
- 解决:递归地求解各个子问题,若子问题足够小,则直接求解
- 合并:将子问题的结果合并成原问题
分治算法能解决的问题,一般需要满足下面这几个条件:
- 原问题与分解成的小问题具有相同的模式
- 原问题分解成的子问题可以独立求解,子问题之间没有相关性(这是分治与动态规划的明显区别)
- 具有分解终止条件,当问题足够小时,可以直接求解
- 可以将子问题合并成原问题,而这个合并操作的复杂度不能太高,否则就起不到减小算法总体复杂度的效果
0.2.1. 分治算法应用
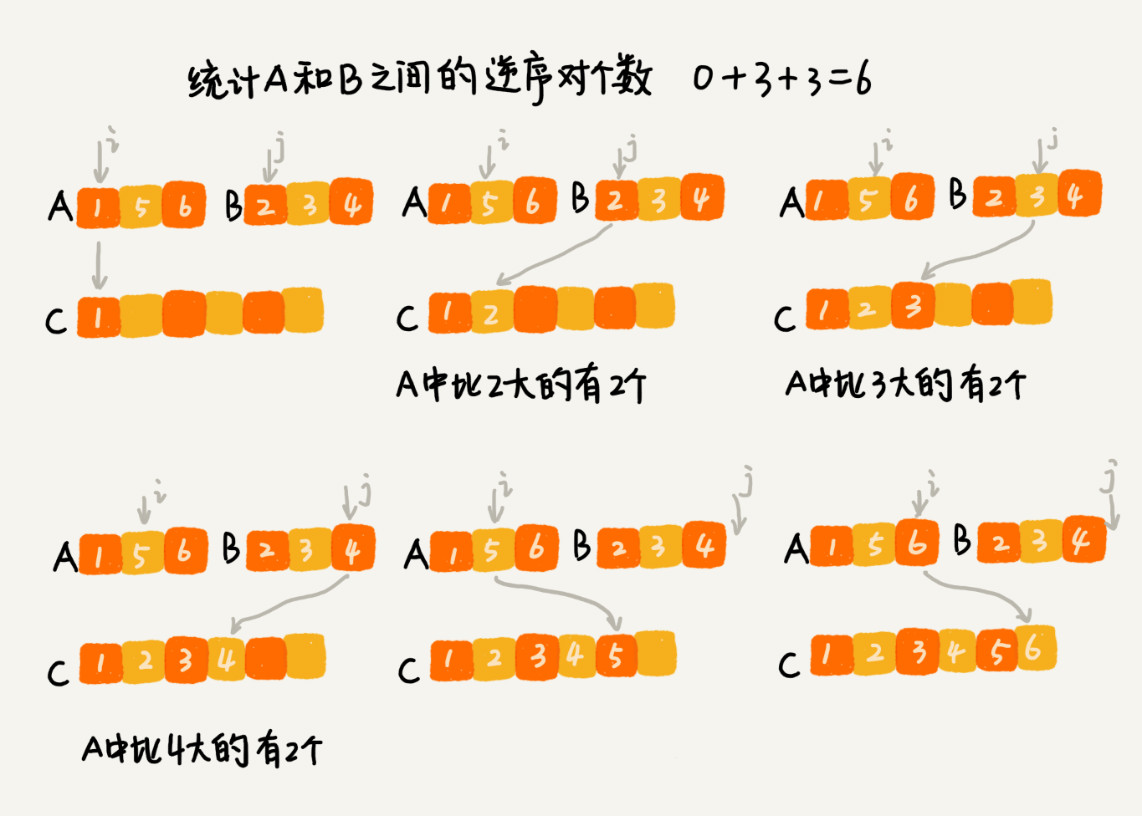
使用分治算法解决排序问题。在排序算法中,用有序度来表示一组数据的有序程度,用逆序度表示一组数据的无序程度。
假设有 n 个数据,期望数据从小到大排列,那完全有序的数据的有序度就是 n(n-1)/2,逆序度等于 0;相反,倒序排列的数据的有序度就是 0,逆序度是 n(n-1)/2。除了这两种极端情况外,通过计算有序对或者逆序对的个数,来表示数据的有序度或逆序度,如何编程求出一组数据的有序对个数或者逆序对个数。
- 解法一:将每个数字与后面的数字比较,看有几个比它小,记作k,依次类推,每个数都考察一遍,将k值球和,得到逆序对个数。时间复杂度\(O(n^2)\)。
- 解法二:分治算法,将数组分为前后两部分(A1,A2),分别求逆序对个数(k1,k2),再计算A1和A2之间的逆序对个数k3,求和
k1+k2+k3。
分治算法的一个要求是,子问题合并的代价不能太大,否则就起不了降低时间复杂度的效果了。
解法二中如何快速计算出两个子问题 A1 与 A2 之间的逆序对个数呢?可以使用归并排序。归并排序中非常关键的操作,就是将两个有序的小数组,合并成一个有序的数组。实际上,在这个合并的过程中,就可以计算这两个小数组的逆序对个数了。每次合并操作,都计算逆序对个数,把这些计算出来的逆序对个数求和,就是这个数组的逆序对个数了。
0.2.2. 分治算法海量数据应用
分治算法思想的应用是非常广泛的:
- 不仅限于指导编程和算法设计
- 还经常用在海量数据处理的场景中
大部分数据结构和算法都是基于内存存储和单机处理。
但是,如果要处理的数据量非常大,没法一次性放到内存中,这个时候,这些数据结构和算法就无法工作了。
比如,给 10GB 的订单文件按照金额排序这样一个需求,看似是一个简单的排序问题,但是因为数据量大,有 10GB,而单机的内存可能只有 2、3GB,无法一次性加载到内存,也就无法通过单纯地使用快排、归并等基础算法来解决了。
要解决数据量大到内存装不下的问题,利用分治的思想。
- 将海量的数据集合根据某种方法,划分为几个小的数据集合
- 每个小的数据集合单独加载到内存来解决
- 再将小数据集合合并成大数据集合
实际上,利用这种分治的处理思路,不仅仅能克服内存的限制,还能利用多线程或者多机处理,加快处理的速度。
上面的例子,先扫描一遍订单,根据订单的金额,将 10GB 的文件划分为几个金额区间。
- 比如订单金额为 1 到 100 元的放到一个小文件
- 101 到 200 之间的放到另一个文件
- 以此类推
每个小文件都可以单独加载到内存排序,最后将这些有序的小文件合并,就是最终有序的 10GB 订单数据了。
如果订单数据存储在类似 GFS 这样的分布式系统上,当 10GB 的订单被划分成多个小文件的时候,每个文件可以并行加载到多台机器上处理,最后再将结果合并在一起,这样并行处理的速度也加快了很多。但是,注意:数据的存储与计算所在的机器是同一个或者在网络中靠的很近(比如一个局域网内,数据存取速度很快),否则就会因为数据访问的速度,导致整个处理过程不但不会变快,反而有可能变慢。
实际上:
- MapReduce 框架只是一个任务调度器
- 底层依赖 GFS 来存储数据
- 依赖 Borg 管理机器
它从 GFS 中拿数据,交给 Borg 中的机器执行,并且时刻监控机器执行的进度,一旦出现机器宕机、进度卡壳等,就重新从 Borg 中调度一台机器执行。
- 可以用来处理数据与数据之间存在关系的任务,比如 MapReduce 的经典例子,统计文件中单词出现的频率
- 可以用来处理数据与数据之间没有关系的任务,比如对网页分析、分词等,每个网页可以独立的分析、分词,而这两个网页之间并没有关系
0.3. 回溯算法
回溯算法在软件开发场景中的应用:
- 深度优先搜索
- 正则表达式匹配
- 编译原理中语法分析
回溯算法在数学中的应用:
- 数独
- 八皇后
- 0-1背包
- 图的着色
- 旅行商问题
- 全排列
笼统地讲,回溯算法很多时候都应用在“搜索”这类问题上。这里的搜索,并不是狭义的指图的搜索算法,而是广义上的在一组可能的解中,搜索满足期望的解。
回溯的处理思想,有点类似枚举搜索。枚举所有的解,找到满足期望的解。回溯算法非常适合用递归来实现,在实现的过程中,剪枝操作是提高回溯效率的一种技巧。
为了有规律地枚举所有可能的解,避免遗漏和重复,把问题求解的过程分为多个阶段。每个阶段,都会面对一个岔路口,先随意选一条路走,当发现这条路走不通的时候(不符合期望的解),就回退到上一个岔路口,另选一种走法继续走。
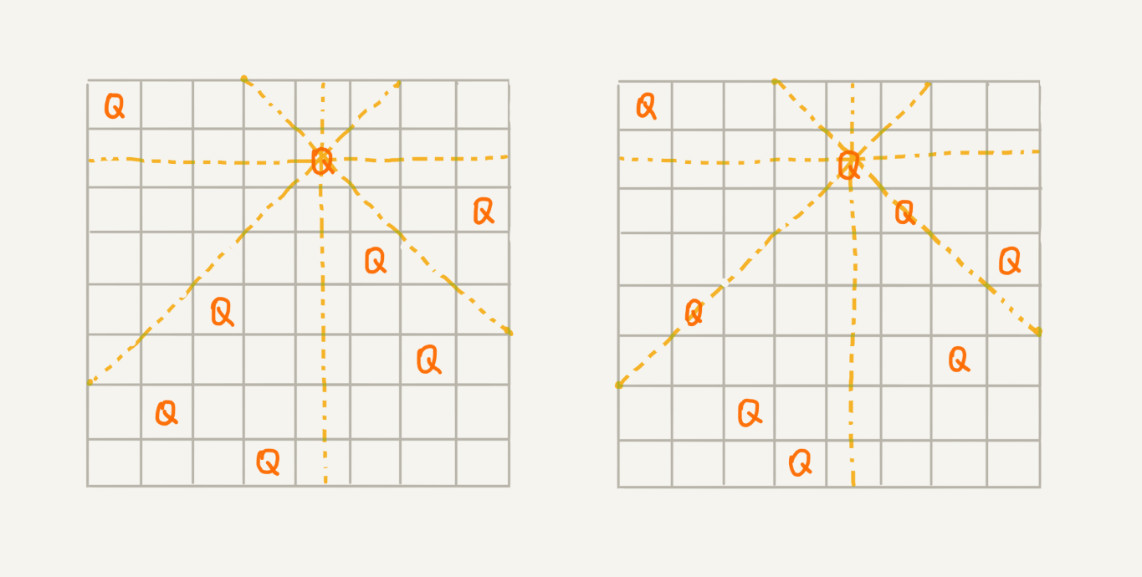
举一个经典的回溯例子,八皇后问题。有一个 8x8 的棋盘,希望往里放 8 个棋子(皇后),每个棋子所在的行、列、对角线都不能有另一个棋子。
第一幅图是满足条件的一种方法,第二幅图是不满足条件的。八皇后问题就是期望找到所有满足这种要求的放棋子方式。
- 把这个问题划分成 8 个阶段,依次将 8 个棋子放到第一行、第二行、第三行……第八行。
- 在放置的过程中,不停地检查当前放法,是否满足要求。
- 如果满足,则跳到下一行继续放置棋子;
- 如果不满足,那就再换一种放法,继续尝试。
回溯算法非常适合用递归代码实现。
0.3.1. 经典应用
0.3.1.1. 0-1背包
0-1 背包是非常经典的算法问题,很多场景都可以抽象成这个问题模型。
这个问题的经典解法是动态规划,另一种简单但没有那么高效的解法就是回溯算法。
有一个背包,背包总的承载重量是 Wkg。有 n 个物品,每个物品的重量不等,并且不可分割。现在期望选择几件物品,装载到背包中。在不超过背包所能装载重量的前提下,如何让背包中物品的总重量最大?
显然,这个问题已经无法通过贪心算法来解决了。
用回溯算法如何来解决。
- 对于每个物品来说,都有两种选择,装进背包或者不装进背包。
- 对于 n 个物品来说,总的装法就有 \(2^n\) 种,去掉总重量超过 Wkg 的,从剩下的装法中选择总重量最接近 Wkg 的。
如何才能不重复地穷举出这 \(2^n\) 种装法呢?
- 把物品依次排列,整个问题就分解为了 n 个阶段,每个阶段对应一个物品怎么选择。
- 先对第一个物品进行处理,选择装进去或者不装进去,然后再递归地处理剩下的物品。
这里还稍微用到了一点搜索剪枝的技巧,就是当发现已经选择的物品的重量超过 Wkg 之后,就停止继续探测剩下的物品。
0.3.1.2. 正则表达式
正则表达式里最重要的一种算法思想就是回溯。
正则表达式中,最重要的就是通配符,通配符结合在一起,可以表达非常丰富的语义。
假设正则表达式中只包含“*”和“?”这两种通配符,并且对这两个通配符的语义稍微做些改变,其中:
- “
*”:匹配任意多个(大于等于 0 个)任意字符 - “
?”:匹配零个或者一个任意字符
用回溯算法,判断一个给定的文本,能否跟给定的正则表达式匹配?
- 依次考察正则表达式中的每个字符,当是非通配符时,直接跟文本的字符进行匹配
- 如果相同,则继续往下处理
- 如果不同,则回溯
- 如果遇到特殊字符,有多种处理方式了,也就是所谓的岔路口
- 比如“
*”有多种匹配方案,可以匹配任意个文本串中的字符,就先随意的选择一种匹配方案,然后继续考察剩下的字符 - 如果中途发现无法继续匹配下去了,就回到这个岔路口,重新选择一种匹配方案
- 然后再继续匹配剩下的字符
- 比如“
0.4. 动态规划
动态规划比较适合用来求解最优问题,比如求最大值、最小值等等。它可以非常显著地降低时间复杂度,提高代码的执行效率。
0.4.1. 动态规划问题模型
0.4.1.1. 0-1背包问题
对于一组不同重量、不可分割的物品,选择一些装入背包,在满足背包最大重量限制的前提下,背包中物品总重量的最大值是多少呢?
使用回溯的解决方法,穷举搜索所有可能的装法,然后找出满足条件的最大值。但是,回溯算法的复杂度比较高,是指数级别的。
寻找规律从而有效降低时间复杂度。
0.4.1.1.1. 回溯解题
- 假设背包的最大承载重量是 9
- 有 5 个不同的物品,重量分别是 2,2,4,6,3
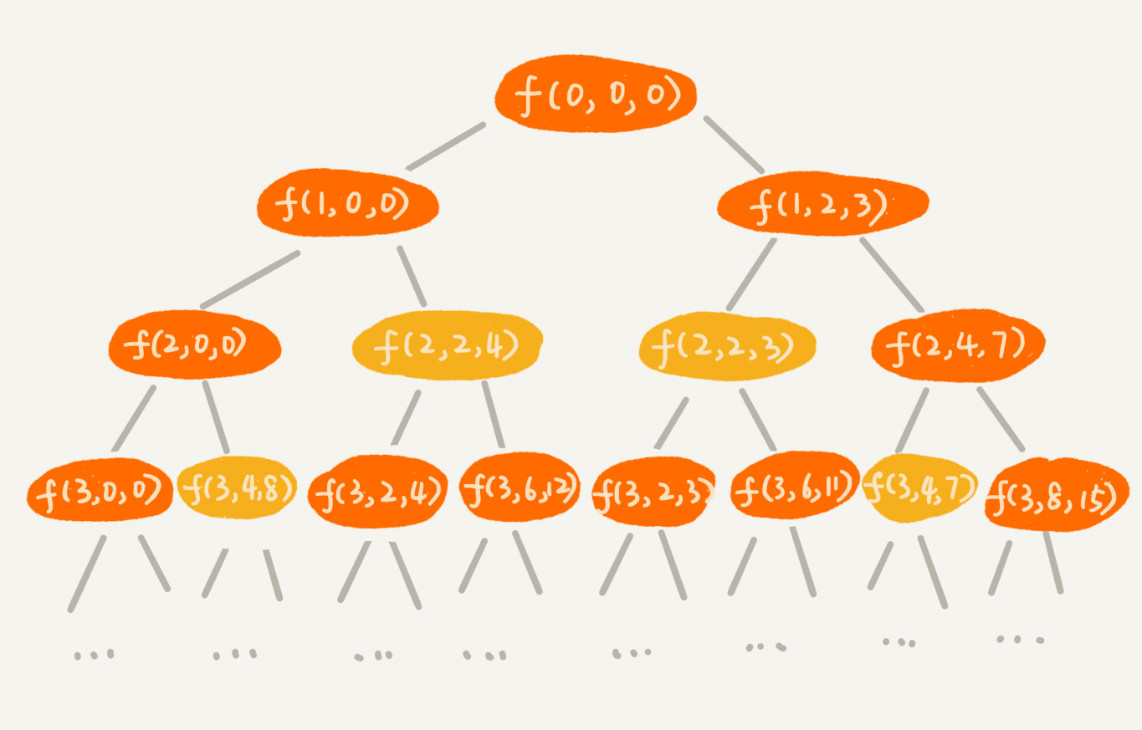
使用回溯求解过程,用递归树画出来,就是下面这个样子:
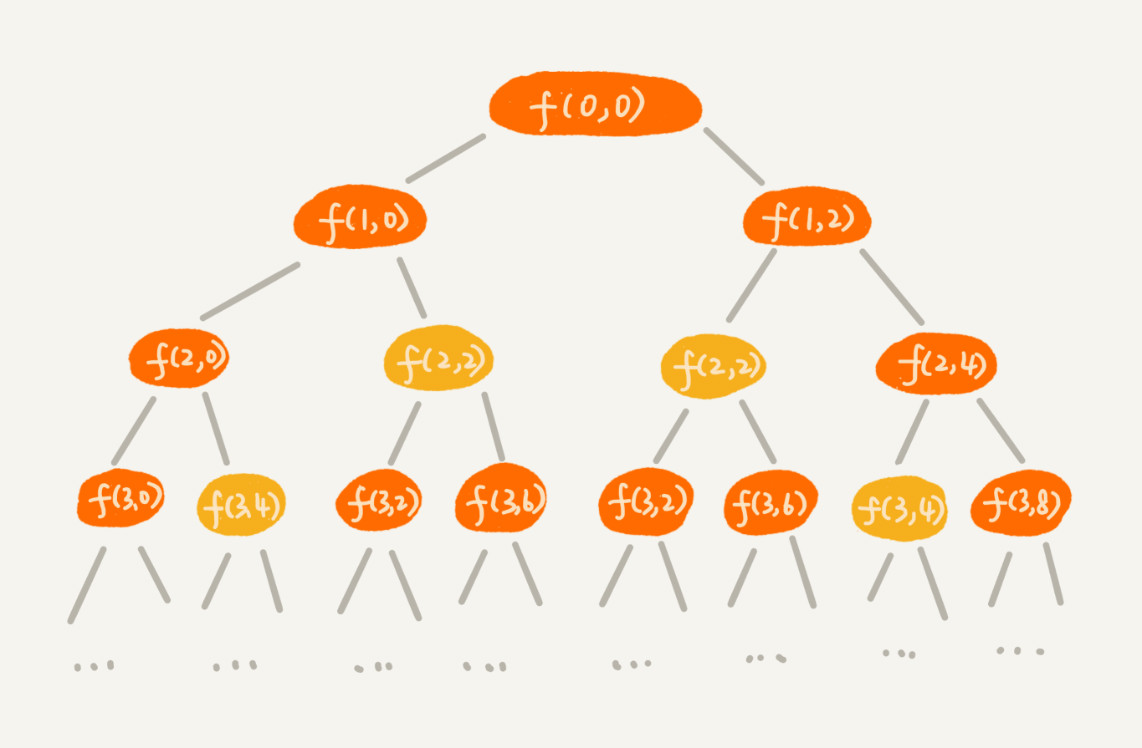
递归树中的每个节点表示一种状态,用(i,cw)来表示。其中:
- i 表示将要决策第几个物品是否装入背包
- cw 表示当前背包中物品的总重量
比如,(2,2)表示将要决策第 2 个物品是否装入背包,在决策前,背包中物品的总重量是 2。
从递归树中可以看出,有些子问题的求解是重复的,比如图中 f(2, 2) 和 f(3,4) 都被重复计算了两次。
因此,可以使用缓存的方式来优化,记录已经计算好的 f(i,cw),当再次计算到重复的 f(i,cw) 的时候,可以直接从缓存中取出来结果,不用再递归计算了,这样就可以避免冗余计算。
使用缓存的解决方法非常好。它已经跟动态规划的执行效率基本上没有差别。
时间复杂度:\(O(2^n)\)
0.4.1.1.2. 动态规划解题
- 把整个求解过程分为 n 个阶段,每个阶段会决策一个物品是否放到背包中
- 每个物品决策(放入或者不放入背包)完之后,背包中的物品的重量会有多种情况,也就是说,会达到多种不同的状态,对应到递归树中,就是有很多不同的节点
- 把每一层重复的状态(节点)合并,只记录不同的状态,然后基于上一层的状态集合,来推导下一层的状态集合
- 通过合并每一层重复的状态,这样就保证每一层不同状态的个数都不会超过 w 个(w 表示背包的承载重量)
- 成功避免了每层状态个数的指数级增长。用一个二维数组
states[n][w+1],来记录每层可以达到的不同状态
具体过程:
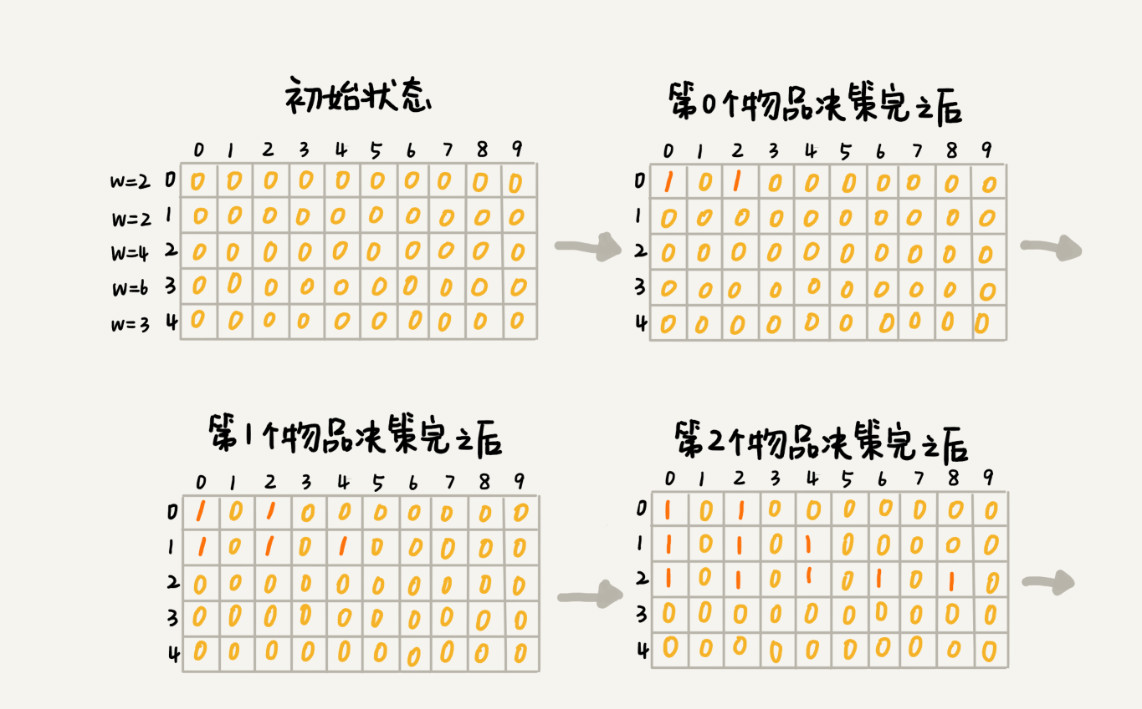
- 第 0 个(下标从 0 开始编号)物品的重量是 2,要么装入背包,要么不装入背包
- 决策完之后,会对应背包的两种状态,背包中物品的总重量是 0 或者 2
- 用
states[0][0]=true和states[0][2]=true来表示这两种状态 - 第 1 个物品的重量也是 2,基于之前的背包状态,在这个物品决策完之后,不同的状态有 3 个,背包中物品总重量分别是
0(0+0),2(0+2 or 2+0),4(2+2) - 用
states[1][0]=true,states[1][2]=true,states[1][4]=true来表示这三种状态 - 以此类推
- 直到考察完所有的物品后,整个 states 状态数组就都计算好
把整个计算的过程画了出来,图中 0 表示 false,1 表示 true。只需要在最后一层,找一个值为 true 的最接近 w(这里是 9)的值,就是背包中物品总重量的最大值。
动态规划解决问题的思路:把问题分解为多个阶段,每个阶段对应一个决策。记录每一个阶段可达的状态集合(去掉重复的),然后通过当前阶段的状态集合,来推导下一个阶段的状态集合,动态地往前推进。
时间复杂度:O(n×w),n 表示物品个数,w 表示背包可以承载的总重量。
尽管动态规划的执行效率比较高,但是需要额外申请一个 n 乘以 w+1 的二维数组,对空间的消耗比较多。所以,动态规划是一种空间换时间的解决思路。
0.4.1.2. -1背包问题升级版
引入物品价值,对于一组不同重量、不同价值、不可分割的物品,选择将某些物品装入背包,在满足背包最大重量限制的前提下,背包中可装入物品的总价值最大是多少呢?
这个问题依旧可以用回溯算法来解决。画出递归树。在递归树中,每个节点表示一个状态,需要 3 个变量(i, cw, cv)来表示一个状态。其中,i 表示即将要决策第 i 个物品是否装入背包,cw 表示当前背包中物品的总重量,cv 表示当前背包中物品的总价值。
在递归树中,有几个节点的 i 和 cw 是完全相同的,比如 f(2,2,4) 和 f(2,2,3)。在背包中物品总重量一样的情况下,f(2,2,4) 这种状态对应的物品总价值更大,可以舍弃 f(2,2,3) 这种状态,只需要沿着 f(2,2,4) 这条决策路线继续往下决策就可以。也就是说,对于 (i, cw) 相同的不同状态,那我们只需要保留 cv 值最大的那个,继续递归处理,其他状态不予考虑。
使用动态规划来解决这个问题,把整个求解过程分为 n 个阶段,每个阶段会决策一个物品是否放到背包中。每个阶段决策完之后,背包中的物品的总重量以及总价值,会有多种情况,也就是会达到多种不同的状态。
用一个二维数组 states[n][w+1],来记录每层可以达到的不同状态。不过这里数组存储的值是当前状态对应的最大总价值。把每一层中 (i,cw) 重复的状态(节点)合并,只记录 cv 值最大的那个状态,然后基于这些状态来推导下一层的状态。
0.4.2. 动态规划理论
- 一个模型:多阶段决策最优模型(用动态规划解决最优解问题,解决的过程经历多个决策阶段,每个决策阶段对应一组状态,我们寻找一组决策序列,能够阐释最终期望求解的最优值)
- 三个特征:
- 最优子结构:问题的最优解包含子问题的最优解(即通过子问题的最优解,推导出问题的最优解),也就是后面阶段的状态可以通过前面阶段的状态推导出来
- 无后效性:
- 在推导后面阶段的状态的时候,只关心前面阶段的状态值,不关心这个状态是怎么一步一步推导出来的
- 某阶段状态一旦确定,就不受之后阶段的决策影响
- 重复子问题:不同的决策序列,到达某个相同的阶段时,可能会产生重复的状态
0.4.2.1. 具体问题
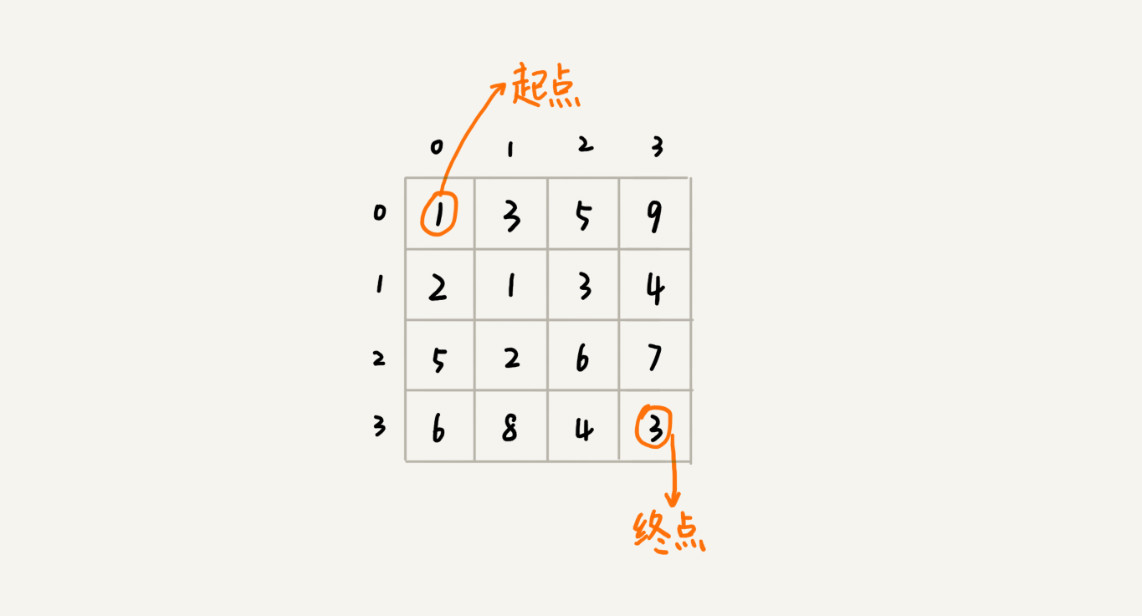
- 假设有一个 n 乘以 n 的矩阵
w[n][n]。 - 矩阵存储的都是正整数。
- 棋子起始位置在左上角,终止位置在右下角。
- 将棋子从左上角移动到右下角。每次只能向右或者向下移动一位。
- 从左上角到右下角,会有很多不同的路径可以走。
- 把每条路径经过的数字加起来看作路径的长度。那从左上角移动到右下角的最短路径长度是多少呢?
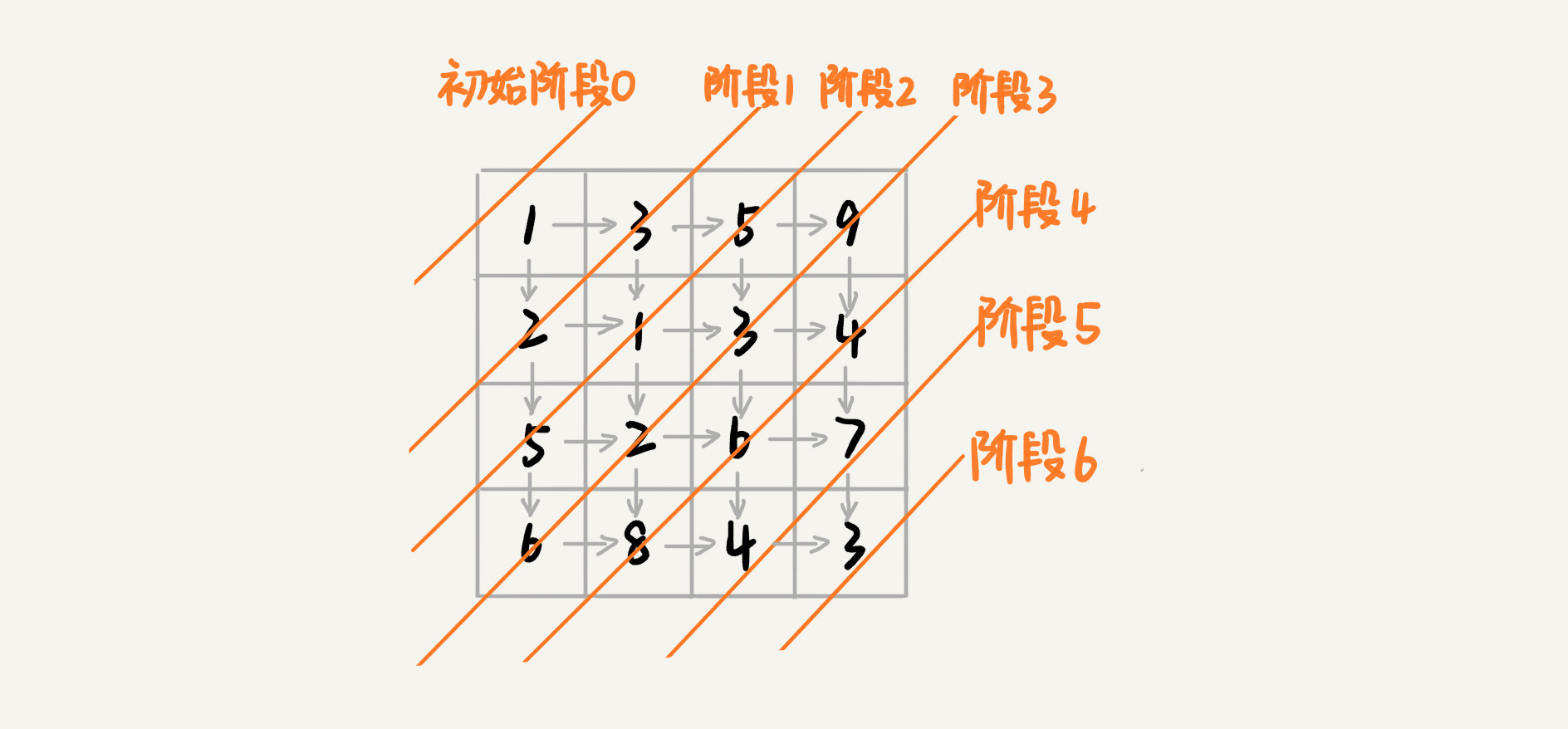
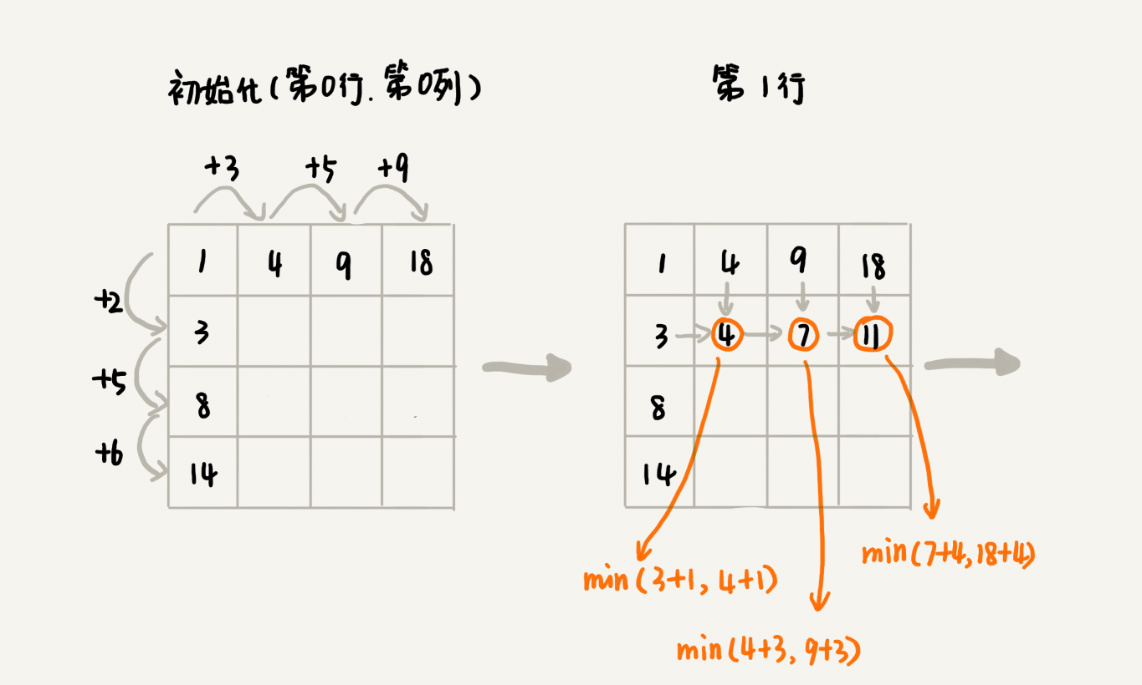
从 (0,0) 走到 (n-1,n-1),总共要走 2*(n-1) 步,也就对应着 2*(n-1) 个阶段。每个阶段都有向右走或者向下走两种决策,并且每个阶段都会对应一个状态集合。把状态定义为 min_dist(i, j),其中 i 表示行,j 表示列。min_dist 表达式的值表示从 (0,0) 到达 (i,j) 的最短路径长度。这个问题是一个多阶段决策最优解问题,符合动态规划的模型。
把从起始位置 (0,0) 到 (i,j) 的最小路径,记作 min_dist(i, j)。因为只能往右或往下移动,所以,只有可能从 (i,j-1) 或者 (i-1,j) 两个位置到达 (i,j)。也就是说,到达 (i,j) 的最短路径要么经过 (i,j-1),要么经过 (i-1,j),而且到达 (i,j) 的最短路径肯定包含到达这两个位置的最短路径之一。换句话说就是,min_dist(i, j) 可以通过 min_dist(i,j-1) 和 min_dist(i-1,j) 两个状态推导出来。这就说明,这个问题符合“最优子结构”。
如果走到 (i,j) 这个位置,只能通过 (i-1,j),(i,j-1) 这两个位置移动过来,也就是说,想要计算 (i,j) 位置对应的状态,只需要关心 (i-1,j),(i,j-1) 两个位置对应的状态,并不关心棋子是通过什么样的路线到达这两个位置的。而且,仅允许往下和往右移动,不允许后退,所以,前面阶段的状态确定之后,不会被后面阶段的决策所改变,所以,这个问题符合“无后效性”这一特征。
使用回溯算法来解决这个问题。画出递归树就会发现,递归树中有重复的节点。重复的节点表示,从左上角到节点对应的位置,有多种路线,说明这个问题中存在重复子问题。
min_dist(i, j) = w[i][j] + min(min_dist(i,j-1), min_dist(i-1,j))0.4.3. 动态规划解题思路
0.4.3.1. 状态转移表法
回溯算法实现 - 定义状态 - 画递归树 - 找重复子问题 - 画状态转移表 - 根据递推关系填表 - 将填表过程翻译成代码。
一般能用动态规划解决的问题,都可以使用回溯算法的暴力搜索解决。
- 当拿到问题的时候,先用简单的回溯算法解决,然后定义状态,每个状态表示一个节点,然后对应画出递归树
- 从递归树中,很容易看是否存在重复子问题,以及重复子问题是如何产生的
- 以此来寻找规律,看是否能用动态规划解决
- 找到重复子问题之后,有两种处理思路
- 第一种是直接用回溯加缓存的方法,来避免重复子问题。从执行效率上来讲,这跟动态规划的解决思路没有差别
- 第二种是使用动态规划的解决方法:状态转移表法
先画出一个状态表。状态表一般都是二维的,把它想象成二维数组。其中,每个状态包含三个变量,行、列、数组值。
- 根据决策的先后过程,从前往后,根据递推关系,分阶段填充状态表中的每个状态
- 最后,将这个递推填表的过程,翻译成代码,就是动态规划代码
尽管大部分状态表都是二维的,但是如果问题的状态比较复杂,需要很多变量来表示,那对应的状态表可能就是高维的,比如三维、四维。那就不适合用状态转移表法来解决了。
- 一方面是因为高维状态转移表不好画图表示
- 另一方面因为人脑确实很不擅长思考高维的东西
如何用这个状态转移表法,来解决上面那个矩阵最短路径的问题。
- 从起点到终点,有很多种不同的走法。可以穷举所有走法,然后对比找出一个最短走法
- 如何才能无重复又不遗漏地穷举出所有走法,可以用回溯算法这个比较有规律的穷举算法
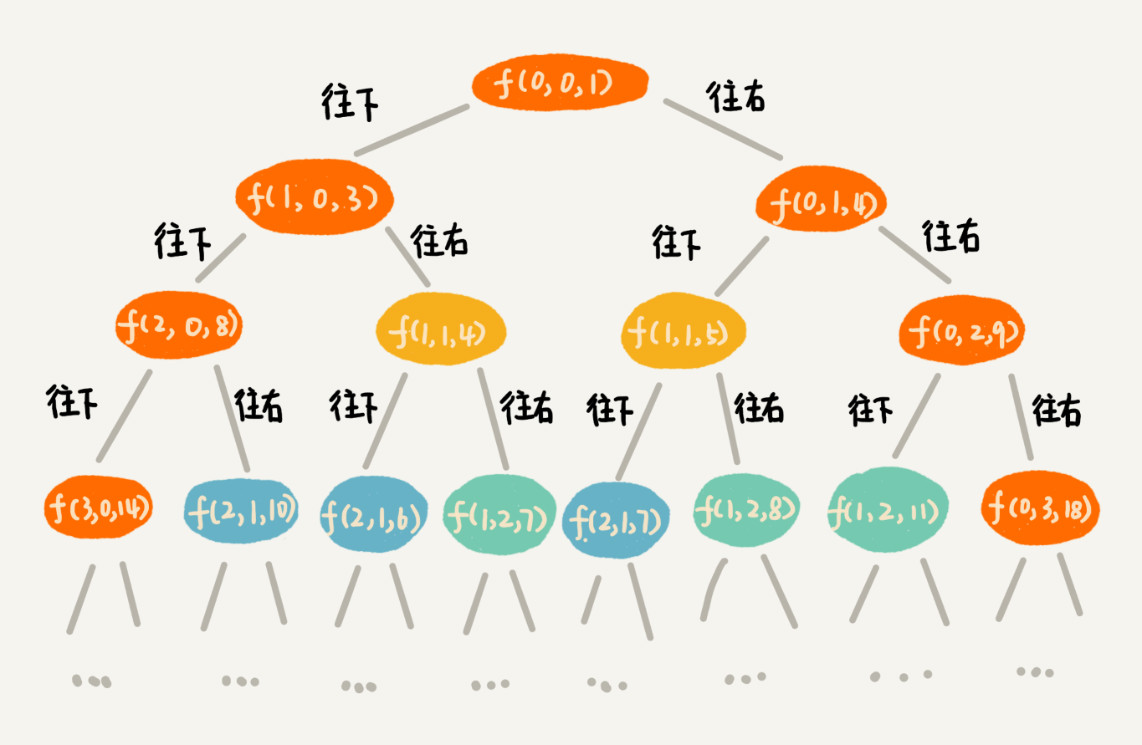
- 有了回溯代码,要画出递归树,以此来寻找重复子问题
- 在递归树中,一个状态(也就是一个节点)包含三个变量 (i, j, dist),其中 i,j 分别表示行和列,dist 表示从起点到达 (i,j) 的路径长度
- 从图中看出,尽管 (i, j, dist) 不存在重复的,但是 (i, j) 重复的有很多
- 对于 (i,j) 重复的节点,只需要选择 dist 最小的节点,继续递归求解,其他节点就可以舍弃了
既然存在重复子问题,就可以尝试用动态规划来解决。
画出一个二维状态表,表中的行、列表示棋子所在的位置,表中的数值表示从起点到这个位置的最短路径。按照决策过程,通过不断状态递推演进,将状态表填好。
0.4.3.2. 状态转移方程法
找最优子结构 - 写状态转移方程 - 将状态转移方程翻译成代码。
状态转移方程法有点类似递归的解题思路。
- 分析某个问题如何通过子问题(最优子结构)来递归求解
- 根据最优子结构,写出递归公式(状态转移方程)
- 有了状态转移方程,代码实现就非常简单了,一般情况下,我们有两种代码实现方法
- 一种是递归加缓存
- 另一种是迭代递推
还是以上面的例子为例,状态转移方程min_dist(i, j) = w[i][j] + min(min_dist(i, j-1), min_dist(i-1, j))。
这里我强调一下,状态转移方程是解决动态规划的关键。
- 如果能写出状态转移方程,那动态规划问题基本上就解决一大半了,而翻译成代码非常简单
- 但是很多动态规划问题的状态本身就不好定义,状态转移方程也就更不好想到
0.4.4. 动态规划实战
量化两个字符串的相似度:编辑距离。
编辑距离:将一个字符串转化成另一个字符串,需要的最少编辑操作次数(比如增加一个字符、删除一个字符、替换一个字符)。编辑距离越大,说明两个字符串的相似程度越小;相反,编辑距离就越小,说明两个字符串的相似程度越大。对于两个完全相同的字符串来说,编辑距离就是 0。
根据所包含的编辑操作种类的不同,编辑距离有多种不同的计算方式,比较著名的有:
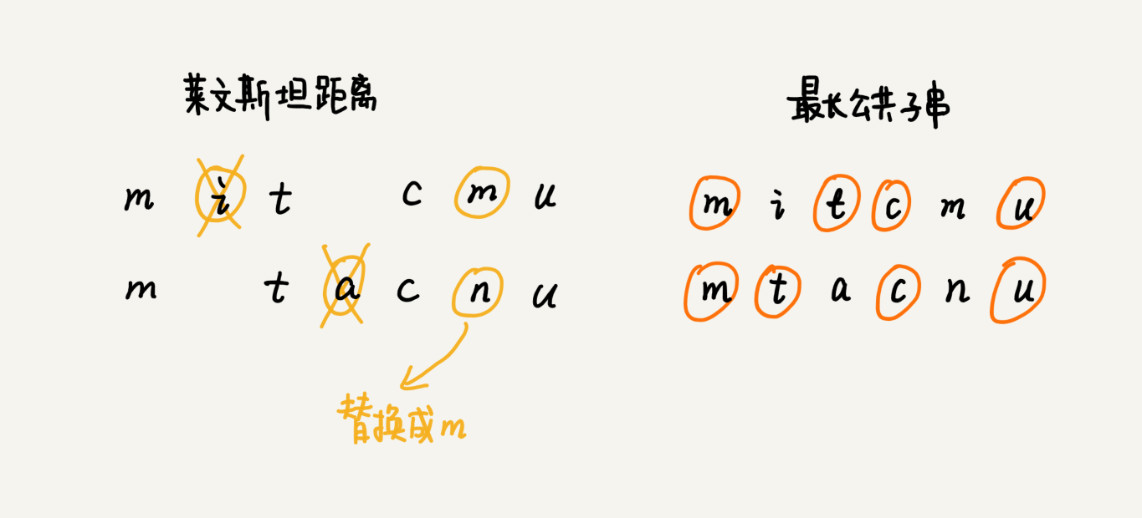
- 莱文斯坦距离(Levenshtein distance):允许增加、删除、替换字符这三个编辑操作;莱文斯坦距离的大小,表示两个字符串差异的大小
- 最长公共子串长度(Longest common substring length):允许增加、删除字符这两个编辑操作;而最长公共子串的大小,表示两个字符串相似程度的大小
两个字符串 mitcmu 和 mtacnu 它们的莱文斯坦距离是 3,最长公共子串长度是 4。
0.4.4.1. 编程计算莱文斯坦距离
这个问题是求把一个字符串变成另一个字符串,需要的最少编辑次数。整个求解过程,涉及多个决策阶段,依次考察一个字符串中的每个字符,跟另一个字符串中的字符是否匹配,匹配的话如何处理,不匹配的话又如何处理。所以,这个问题符合多阶段决策最优解模型(贪心、回溯、动态规划可以解决的问题,都可以抽象成这样一个模型)。
回溯是一个递归处理的过程:
- 如果
a[i]与b[j]匹配,递归考察a[i+1]和b[j+1] - 如果
a[i]与b[j]不匹配,有多种处理方式可选:- 可以删除
a[i],然后递归考察a[i+1]和b[j] - 可以删除
b[j],然后递归考察a[i]和b[j+1] - 可以在
a[i]前面添加一个跟b[j]相同的字符,然后递归考察a[i]和b[j+1] - 可以在
b[j]前面添加一个跟a[i]相同的字符,然后递归考察a[i+1]和b[j] - 可以将
a[i]替换成b[j],或者将b[j]替换成a[i],然后递归考察a[i+1]和b[j+1]
- 可以删除
根据回溯算法的实现画出递归树,看是否存在重复子问题。如果存在重复子问题,就可以考虑能否用动态规划来解决;如果不存在重复子问题,那回溯就是最好的解决方法。
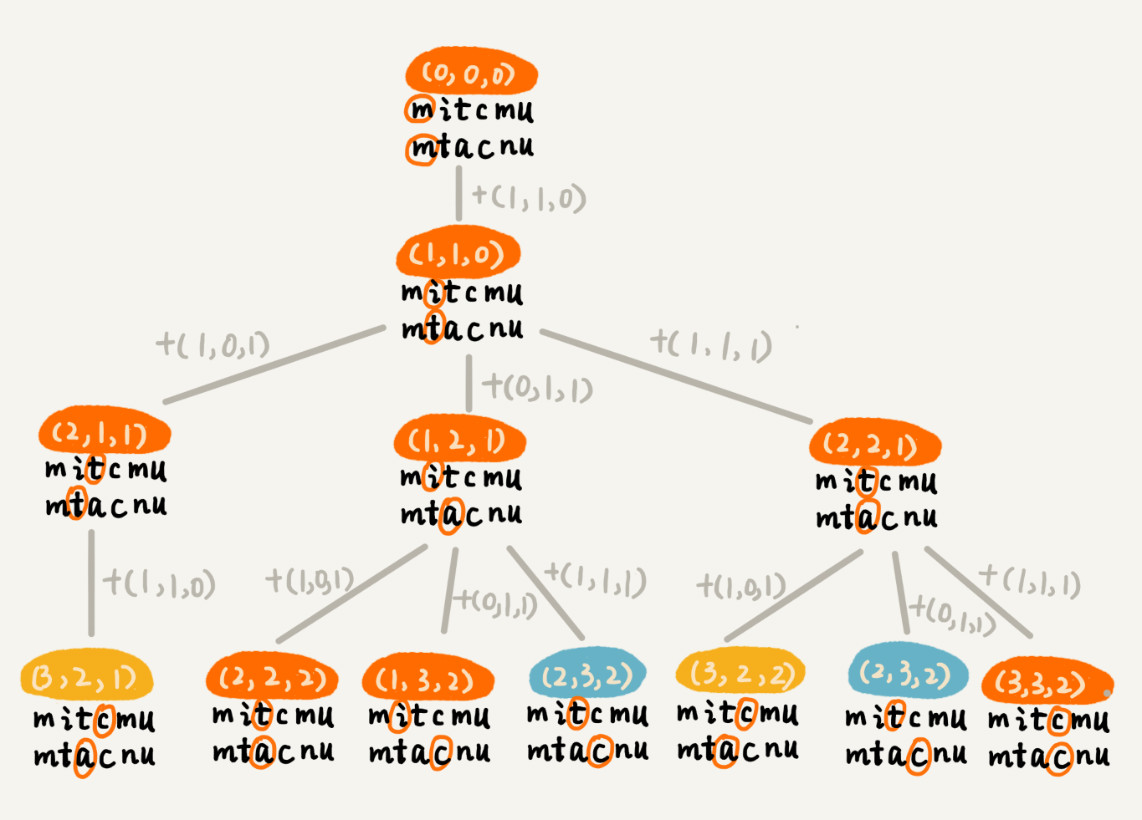
在递归树中,每个节点代表一个状态,状态包含三个变量 (i,j,edist),其中,edist 表示处理到 a[i]和 b[j]时,已经执行的编辑操作的次数。
在递归树中,(i,j) 两个变量重复的节点很多,比如 (3, 2) 和 (2, 3)。对于 (i,j) 相同的节点,只需要保留 edist 最小的,继续递归处理就可以了,剩下的节点都可以舍弃。
所以,状态就从 (i,j,edist) 变成了 (i,j,min_edist),其中,min_edist 表示处理到 a[i]和 b[j],已经执行的最少编辑次数。
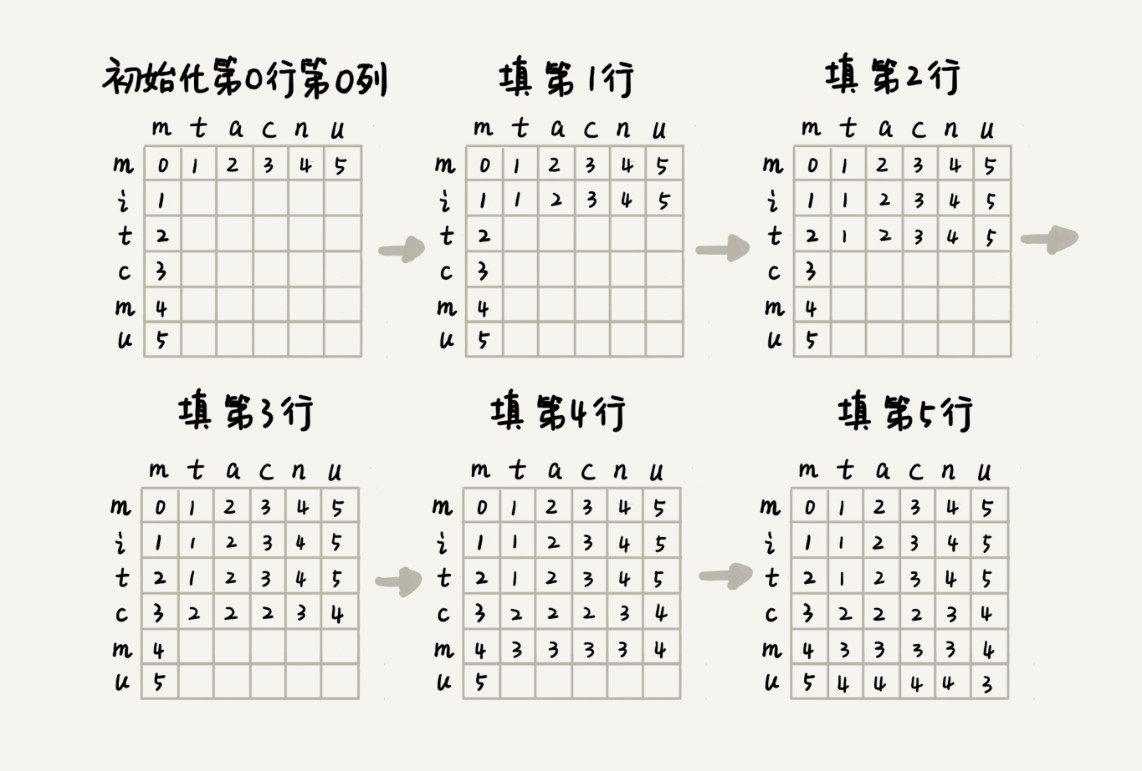
这个问题符合动态规划,但是,状态转移方式要复杂很多,状态 (i,j) 可能从 (i-1,j),(i,j-1),(i-1,j-1) 三个状态中的任意一个转移过来。基于刚刚的分析,把状态转移的过程,用公式写出来,就是状态转移方程。
// 如果:a[i]!=b[j],那么:min_edist(i,j)就等于:
min(min_edist(i-1,j)+1, min_edist(i,j-1)+1, min_edist(i-1,j-1)+1)
// 如果:a[i]==b[j],那么:min_edist(i,j)就等于:
min(min_edist(i-1,j)+1, min_edist(i,j-1)+1,min_edist(i-1,j-1))
// 其中,min表示求三数中的最小值。了解了状态与状态之间的递推关系,画出一个二维的状态表,按行依次来填充状态表中的每个值。
既有状态转移方程,又理清了完整的填表过程,代码实现就非常简单了。
关于复杂算法问题的解决思路的一些经验和技巧:
- 当拿到一个问题的时候,先不思考,计算机会如何实现这个问题,而是单纯考虑“人脑”会如何去解决这个问题。人脑比较倾向于思考具象化的、摸得着看得见的东西,不适合思考过于抽象的问题。
- 把抽象问题具象化,可以实例化几个测试数据,通过人脑去分析具体实例的解,然后总结规律,再尝试套用学过的算法,看是否能够解决。
- 看到问题,立马想到能否用动态规划解决,然后直接就可以寻找最优子结构,写出动态规划方程,然后将状态转移方程翻译成代码。
0.4.4.2. 编程计算最长公共子串长度
最长公共子串作为编辑距离中的一种,只允许增加、删除字符两种编辑操作。从本质上来说,它表征的也是两个字符串之间的相似程度。这个问题的解决思路,跟莱文斯坦距离的解决思路非常相似,也可以用动态规划解决。
每个状态包括三个变量 (i, j, max_lcs),max_lcs 表示 a[0…i]和 b[0…j]的最长公共子串长度。
回溯的处理思路:
- 从
a[0]和b[0]开始,依次考察两个字符串中的字符是否匹配 - 如果
a[i]与b[j]互相匹配,将最大公共子串长度加一,并且继续考察a[i+1]和b[j+1] - 如果
a[i]与b[j]不匹配,最长公共子串长度不变,这个时候,有两个不同的决策路线:- 删除
a[i],或者在b[j]前面加上一个字符a[i],然后继续考察a[i+1]和b[j] - 删除
b[j],或者在a[i]前面加上一个字符b[j],然后继续考察a[i]和b[j+1]
- 删除
反过来也就是说,要求 a[0…i]和 b[0…j]的最长公共长度 max_lcs(i,j),只有可能通过下面三个状态转移过来:
(i-1,j-1,max_lcs),其中 max_lcs 表示 a[0…i-1]和b[0…j-1]的最长公共子串长度(i-1,j,max_lcs),其中 max_lcs 表示a[0…i-1]和b[0…j]的最长公共子串长度(i,j-1,max_lcs),其中 max_lcs 表示a[0…i]和b[0…j-1]的最长公共子串长度
把这个转移过程,用状态转移方程写出来,就是下面这个样子:
// 如果:a[i]==b[j],那么:max_lcs(i, j)就等于:
max(max_lcs(i-1,j-1)+1, max_lcs(i-1, j), max_lcs(i, j-1));
// 如果:a[i]!=b[j],那么:max_lcs(i, j)就等于:
max(max_lcs(i-1,j-1), max_lcs(i-1, j), max_lcs(i, j-1));
// 其中max表示求三数中的最大值。0.5. 四种算法比较
- 贪心、回溯、动态规划可以归为一类:解决问题的模型,都可以抽象成多阶段决策最优解模型
- 分治单独作为一类:解决的问题尽管大部分也是最优解问题,但是,大部分都不能抽象成多阶段决策模型
0.5.1. 回溯
- 回溯算法是个“万金油”。基本上能用的动态规划、贪心解决的问题,我们都可以用回溯算法解决
- 回溯算法相当于穷举搜索。穷举所有的情况,然后对比得到最优解
- 回溯算法的时间复杂度非常高,是指数级别的,只能用来解决小规模数据的问题。对于大规模数据的问题,用回溯算法解决的执行效率就很低了
0.5.2. 动态规划
- 尽管动态规划比回溯算法高效,但是,并不是所有问题,都可以用动态规划来解决
- 能用动态规划解决的问题,需要满足三个特征,最优子结构、无后效性和重复子问题
0.5.3. 分治
- 在重复子问题这一点上,动态规划和分治算法的区分非常明显
- 分治算法要求分割成的子问题,不能有重复子问题
- 而动态规划正好相反,动态规划之所以高效,就是因为回溯算法实现中存在大量的重复子问题
0.5.4. 贪心
- 贪心算法实际上是动态规划算法的一种特殊情况。它解决问题起来更加高效,代码实现也更加简洁。
- 它可以解决的问题也更加有限。它能解决的问题需要满足三个条件,最优子结构、无后效性和贪心选择性(这里不强调重复子问题)。其中,最优子结构、无后效性跟动态规划中的无异。
- “贪心选择性”的意思是,通过局部最优的选择,能产生全局的最优选择。每一个阶段,都选择当前看起来最优的决策,所有阶段的决策完成之后,最终由这些局部最优解构成全局最优解。